



Project information
- Name: Remote Control of Robotic Arm [ Github Link ]
- Category: Undergraduate Research Opportunities Programme (UROP)
- Supervisor: Prof. Thomas Parisini, Dr. Kaiwen Chen
- Year: 2023
- Location: London, UK
Remote Control of Colour-tracking Robotic Rrm with ROS2 Integration
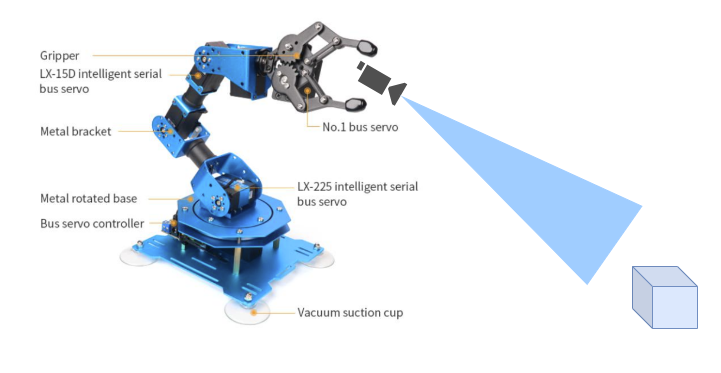
I developed a 4-DOF robotic arm with color-tracking capabilities, utilizing remote control within the ROS2 framework.
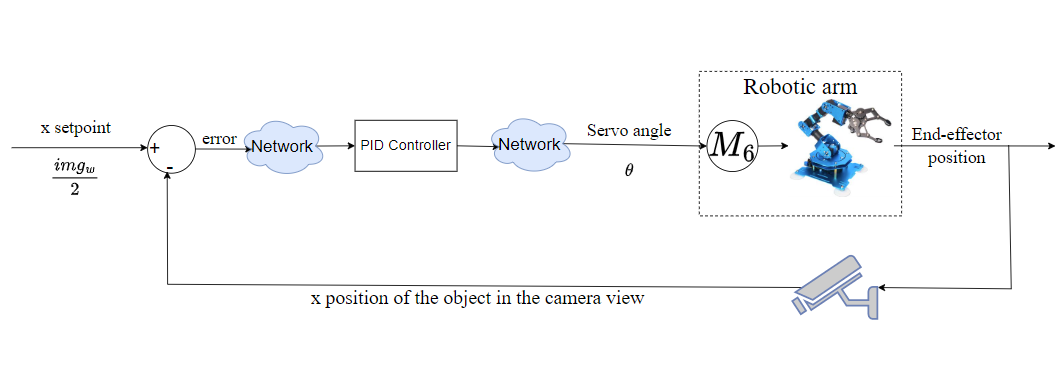
This project integrated a USB camera as a sensor within the feedback loop to effectively manage bus servo motors.
Geometric inverse kinematics analysis was employed to calculate joint variables based on end-effector position and orientation.
To control the motors, a Raspberry Pi was employed to transmit commands through UART while simultaneously publishing image frames to ROS2 topics.
Additionally, I implemented controller separation on a remote machine, allowing communication with the local node through the ROS2 network,
and subsequently conducted an in-depth analysis of stability margins. Furthermore, I built a 2nd order transfer function model by exploring the step response of one of the motors.