


Project information
- Name: Self-balancing maze-solving rover
- Category: Summer term project
- Year: 2023
- Location: Imperial College London, UK
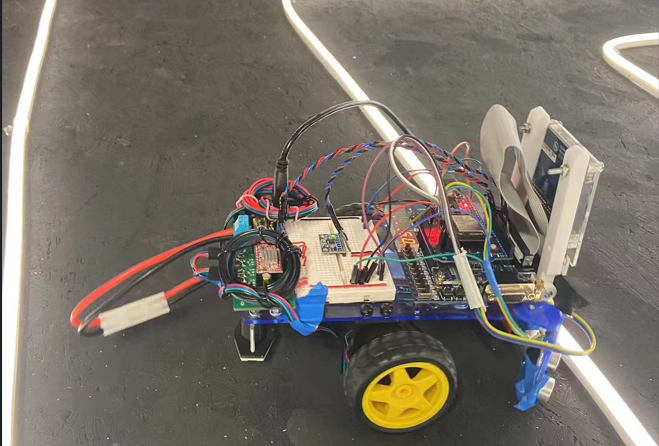
Advanced Team-Built Rover: Autonomous Maze Solving, Real-Time Mapping, and Optimal Pathfinding
Collaborating as a team of 2 EEE and 4 EIE members, we crafted a self-balancing rover proficient in autonomously solving mazes,
live mapping, and finding the shortest paths.
The rover integrates NEMA 17 stepper motors, A4988 drivers, an MPU-6050 gyroscope, ESP32, FPGA, and a camera.
Employing FPGA vision technology, we achieved superior image processing, ensuring precise navigation and obstacle detection.
Our approach includes PID, triangulation, A*, clustering, and graph theory algorithms, finely tuned to optimize performance and effectiveness.